Utiliser les capteurs
Maintenant que l’on sait faire bouger notre robot, faisons le bouger intelligemment. Mais cela n’est pas possible si nous n’avons pas d’indications sur l’état du robot. C’est pourquoi nous utilisons des capteurs.
Limit switch
Description
L’un des types de capteur les plus simple à utiliser est le limit switch. C’est un interrupteur qui revient à sa place quand il n’est pas pressé (un bouton poussoir).

Ce capteur nous permet de savoir si un mécanisme a atteint un certain point. Par exemple, un limit switch situé au bout d’un bras pivotant peut nous dire si le bras touche le bord du robot.
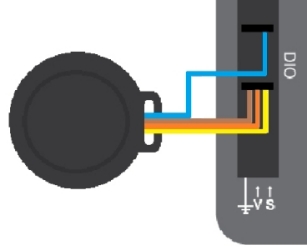
Un limit switch se branche aux ports DIO du Roborio grâce à deux cables. Un va sur le ground (⏚) et l’autre sur le signal (S). Pourtant, le switch possède souvent 3 connecteurs : Normally Open (NO), Normally Closed (NC), et ground (C ou COM). Normally Open signifie que le switch est normalement non-pressé. Quand il sera pressé, un message sera envoyé au Roborio. Normally Closed signifie le contraire. Connectez un des cables au connecteur NO ou NC, et l’autre au ground.
Dans le Code
Pour programmer un limit switch, créez une instance de la classe DigitalInput, son constructeur attend comme argument le port DIO sur lequel le switch est branché :
#include <frc/DigitalInput.h>
frc::DigitalInput mon_switch(0);
La méthode bool Get() renvoie true ou false suivant la position du
switch (appuyé/relâché) et ses branchements (NO/NC) :
bool switchPresse = mon_switch.Get();
Encodeurs
Description
Les encodeurs permettent de connaître la position précise d’un mécanisme. Ils se fixent sur des axes et comptent le nombre de tours que ceux-ci font. Ce sont des sortes de compteurs : quand l’axe tourne dans un sens la « position » augmente, quand il tourne dans le sens inverse la « position » diminue. Les encodeurs peuvent être optiques ou bien magnétiques.

Voici la façon dont il se branche :
Dans le Code
Pour programmer un encodeur, créez une instance de la classe Encoder, son constructeur attend comme argument les port DIO sur lesquels l’encodeur est branché :
#include <frc/Encoder.h>
frc::Encoder mon_encodeur(0, 1);
La méthode int Get() renvoie la distance angulaire mesurée par l’encodeur
en ticks. Selon le modèle, un tour équivaut à 360 ticks, 22 ticks, … :
double distance = mon_encodeur.Get();
La méthode void Reset() remet le compteur à zéro :
mon_encodeur.Reset();
Les méthodes void SetDistancePerPulse(double distancePerPulse) et
double GetDistance() permettent de convertir automatiquement les tick
en une autre unité :
// 1 tour équivaut à 360 ticks
mon_encodeur.SetDistancePerPulse(1.0/360);
double nombre_de_tours = mon_encodeur.GetDistance();
La méthode void GetRate() renvoie la vitesse actuelle convertie en
distance selon le facteur de conversion (1 par défaut) :
double vitesse = mon_encodeur.GetRate();
Gyroscopes
Description
Les gyroscopes permettent de connaître la vitesse et le sens de rotation du robot. Ils permettent aussi de connaître l’angle du robot sur le terrain. Ils peuvent se brancher sur le port SPI ou les ports Analog In 0 et 1 du Roborio.
Dans le Code
Pour programmer un gyroscope, créez une instance de la classe ADXRS450_Gyro (SPI) ou AnalogGyro (Analog In) en fonction du gyroscope. Le constructeur d”AnalogGyro attend comme argument le port Analog In (0 ou 1) sur lequel le gyroscope est branché :
#include <frc/ADXRS450_Gyro.h>
frc::ADXRS450_Gyro mon_gyro();
#include <frc/AnalogGyro.h>
frc::AnalogGyro mon_gyro(0);
La méthode double GetAngle() renvoie l’angle du robot en degrés dans
le sens des aiguilles d’une montre :
double angle = mon_gyro.GetAngle();
La méthode double GetRate() renvoie la vitesse de rotation du robot en
degrés par secondes dans le sens des aiguilles d’une montre :
double vitesse_rotation = mon_gyro.GetRate();
La méthode void Calibrate() calibre le gyroscope en définissant son
centre. La méthode void Reset() remet le gyroscope à zéro :
// Initialisation du gyro
mon_gyro.Calibrate();
mon_gyro.Reset();