Contrôler un moteur
Les contrôleurs moteur
Pour contrôler les moteurs présents sur le robot, nous avons besoin de contrôleurs moteurs. En un mot, ceux-ci reçoivent un signal de faible intensité de la part du RoboRio et envoient au moteur un signal de plus forte intensité. Voici quelques exemples de contrôleurs moteur que nous utilisons : VictorSP, Spark et SparkMax.

PWM et CAN
Il y a 2 manières de contrôler ceux-ci : en PWM ou en CAN. Tous les contrôleurs supportent le PWM mais seulement une partie d’entre eux supporte le CAN.
La principale différence entre les deux modes de transmission est que le PWM ne peut commander que la vitesse du moteur tandis que le CAN permet des contrôles plus avancés et la communication d’informations entre le contrôleur et le RoboRio.
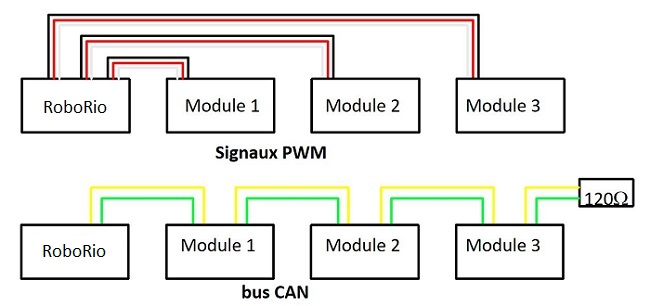
La méthode la plus simple est le PWM. Elle nous permet de contrôler rapidement le moteur voulu en branchant le cable du contrôleur sur le bon port PWM du RoboRio (encadrés en rouge).

Dans le Code
Du côté du RoboRio, il nous suffit de créer un objet correspondant au contrôleur pour pouvoir asservir le moteur. WpiLib propose une classe pour chaque contrôleur. En fait, avec le PWM, ces classes sont toutes presque identiques car elles dérivent toutes de la même classe PWMSpeedController. Cependant, elles ont été dérivées sous plusieurs noms :
#include <frc/VictorSP.h>
#include <frc/Spark.h>
#include <frc/PWMVictorSPX.h>
Remarquez que VictorSPX est précédé de PWM, c’est parce qu’il peut
être contrôlé via le CAN. Pour différencier les 2 classes (qui sont
totalement différentes, celui-ci se nomme donc PWMVictorSPX.
Quand on crée un objet qui représente un contrôleur PWM, on doit spécifier dans le constructeur le port sur lequel il est branché. Par exemple, pour un VictorSP branché sur le port n°0 :
frc::VictorSP mon_moteur(0);
On a ensuite accès à tout un tas de méthodes qui nous permettent de contrôler le moteur.
Pour « donner » une puissance voulue à un moteur, on utilise la méthode :
void Set(double value) qui attend en argument un double entre -1
(pleine puissance vers l’arrière) et 1 (pleine puissance vers l’avant).
Si je veux faire tourner mon moteur à la moitié de sa vitesse maximum :
mon_moteur.Set(0.5);
On a aussi void StopMotor() qui remplace Set(0) et
void SetInverted(bool isInverted) qui inverse la direction du moteur
si on lui donne comme argument true.
mon_moteur.SetInverted(true);
mon_moteur.StopMotor();